【Bluetooth測距の実力は?】nRF54L15 DKボードを使ってChannel Soundingの距離測定を試してみました
こんにちは。ムセンコネクト三浦です。
今日は、話題のBluetooth® LEの距離測定であるチャネルサウンディング(Channel sounding)を試してみた結果を紹介します。
チャネルサウンディングについてはこちらの記事でも紹介しています。

実験環境と測距の仕組み
実験ではNordic Semiconductor社のnRF54L15 DKボードを2台利用して測定を行いました。

実験にあたって、「技適未取得機器を用いた実験等の特例制度」を利用しました。

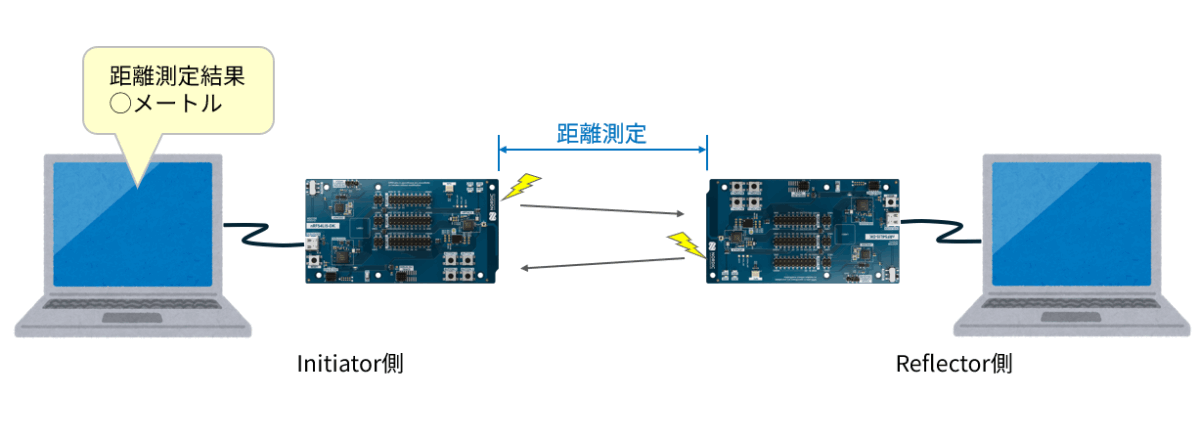
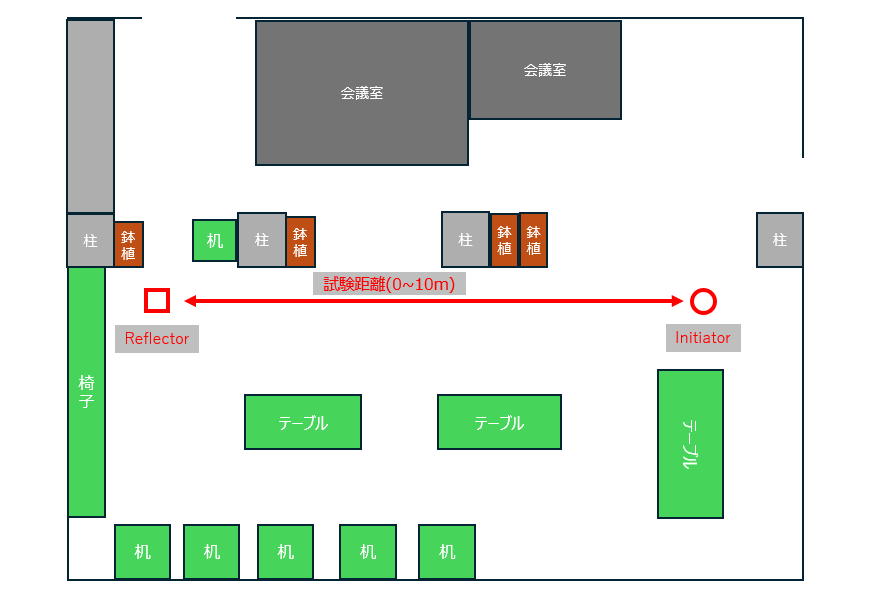
チャネルサウンディングではInitiator(イニシエータ)側とReflector(リフレクター)側に分かれ、それぞれ別のプログラムで動作します。
Initiatorは日本語で言うと「発起人」や「開始する人」です。チャネルサウンディングの通信を開始する側であり、距離測定をする側になります。
Reflectorは日本語で言うと「反射鏡」ですが、Initiatorからの電波を受けとって、Initiatorに電波を返すだけの役割をします。Reflector側では距離測定の結果を知ることができません。
Nordic Semiconductorが提供するチャネルサウンディングのサンプルでは以下の3つの手法で距離測定の結果をアウトプットすることが出来ます。
それぞれの手法をちゃんと理解するには専門的な知識が必要になります。
RTT(Round Trip Time:往復時間)
RTTは、信号がInitiatorからReflectorに送信され、再びInitiatorに戻ってくるまでの総時間を測定する手法です。
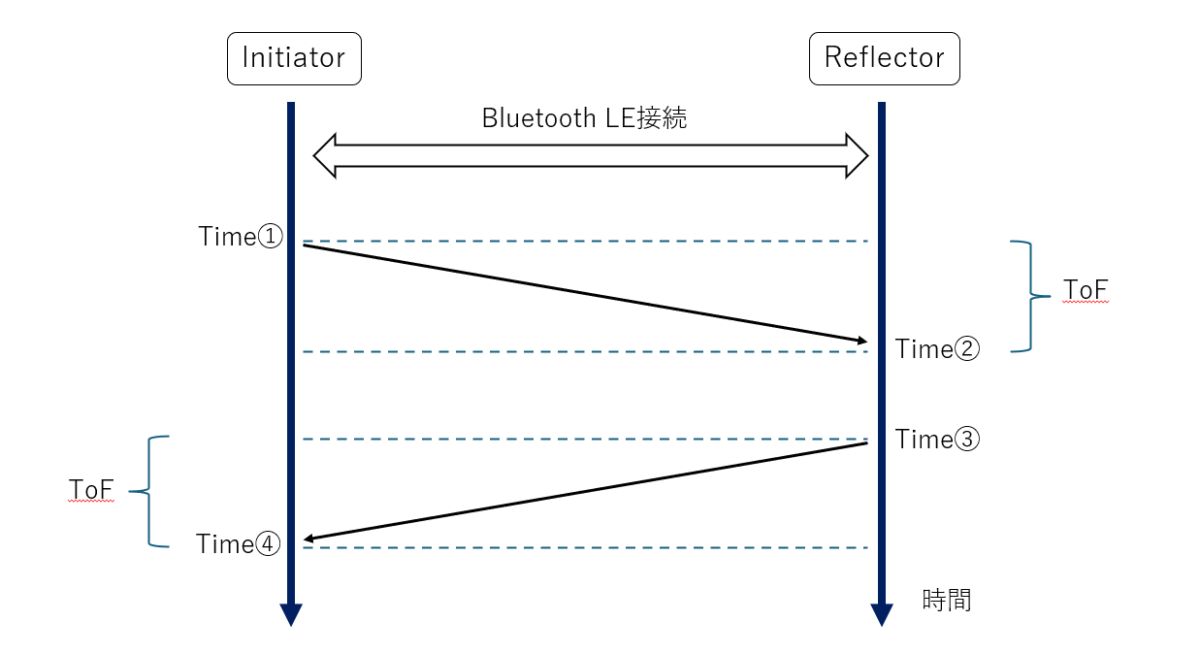
電波は光の速さ(約3×108m/秒)で伝わりますので、基本的な計算式は
2・ToF = ( Time④ ー Time①)ー(Time③ ー Time②)
距離 = ( 2・ToF ) /2 × 光速
となります。
ちょっとした時間のバラツキが距離精度に大きく影響するので、内部処理時間を補正する仕組みを持っています。
PBR(Phase-Based Ranging:位相ベース測距)
PBRは、送信した信号と受信した信号の位相差を複数の周波数で測定し、その情報から距離を推定する手法です。同じ距離でも周波数によって受信した際の位相が変化する性質を利用します。
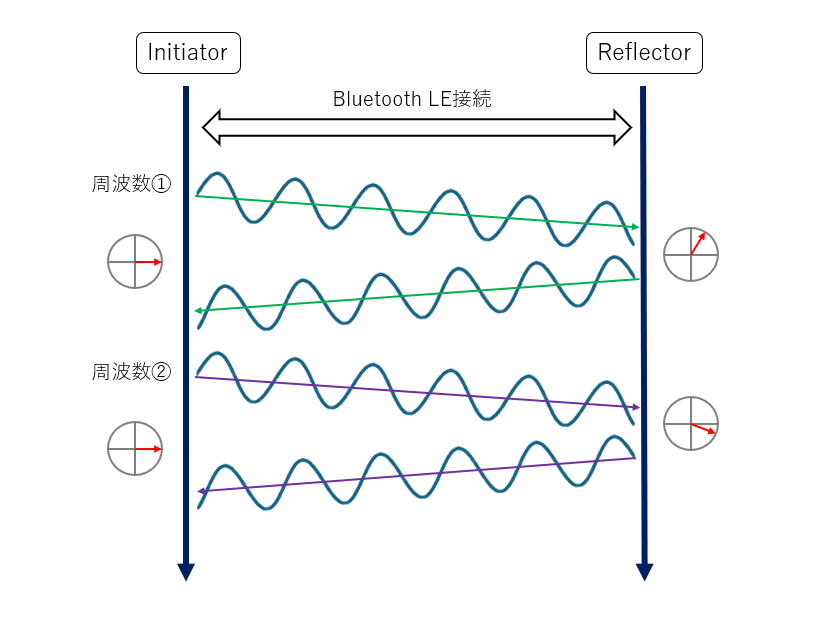
できるだけ多くの周波数を利用した方が精度が上がります。
Bluetoothのチャネルサウンディングでは最大72チャンネルが利用可能です。
IFFT(Inverse Fast Fourier Transform:逆高速フーリエ変換)
チャネルサウンディングでは、複数の周波数でチャネルの応答(振幅と位相)を測定します。これは周波数領域でのチャネル情報と見なせます。
IFFTは、この周波数領域のデータを時間領域のデータに変換する数学的な処理です。これにより出力された結果をインパルス応答と呼びます。
インパルス応答は、信号が送信されてから受信されるまでの間に、直接波や反射波などが時間的にどのように到達するかを示します。
この中で最も早く到達する強い信号(直接波)のピークを検出することで、信号の伝播時間、ひいては距離を推定することができます。
Bluetooth SIGがチャネルサウンディングを説明する資料の中ではRTTとPBRについては記載されていますが、IFFTについてはあまり触れられていません。
IFFT自体は無線通信や信号処理の分野では広く用いられる数学的手法ですので、Nordic Semiconductor社が更に信号処理して精度向上を図ったものと思われます。
屋外での距離測定
まずはチャネルサウンディングを屋外で試してみました。
場所はムセンコネクトの技術開発センターの駐車場です。
50mまで距離を離して実験をすることができました。

イニシエータデバイスを固定設置して、リフレクターデバイスを動かして距離を離しながら距離測定を実施しました。
結果は以下の通りです。
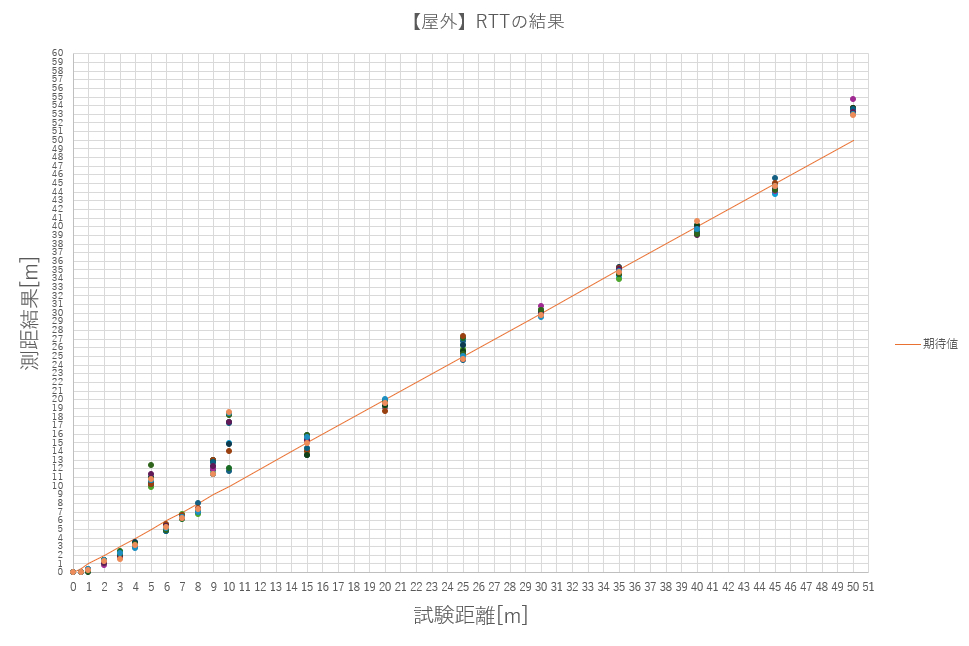
- 感覚的な話ですが、従来のRSSIを利用した距離推定と比較すると距離推定精度がとても良い印象を持ちました。
- 50mの長距離でも距離測定を行うことが出来ました。
- 距離が離れるのに比例して精度が悪くなることを想定していたのですが、距離が離れても一定の距離精度が維持出来ています。
- 環境要因かもしれませんが、5m地点、10m地点でのバラツキが大きくなりました。
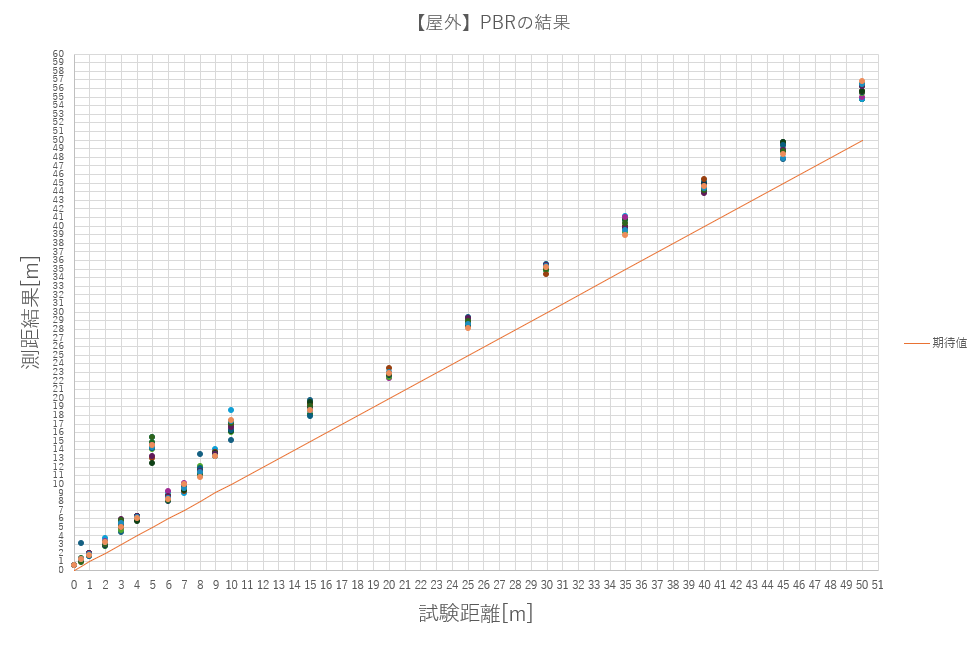
- PBRでは全体的に距離測定結果が期待値よりも大きくなる傾向が見られました。
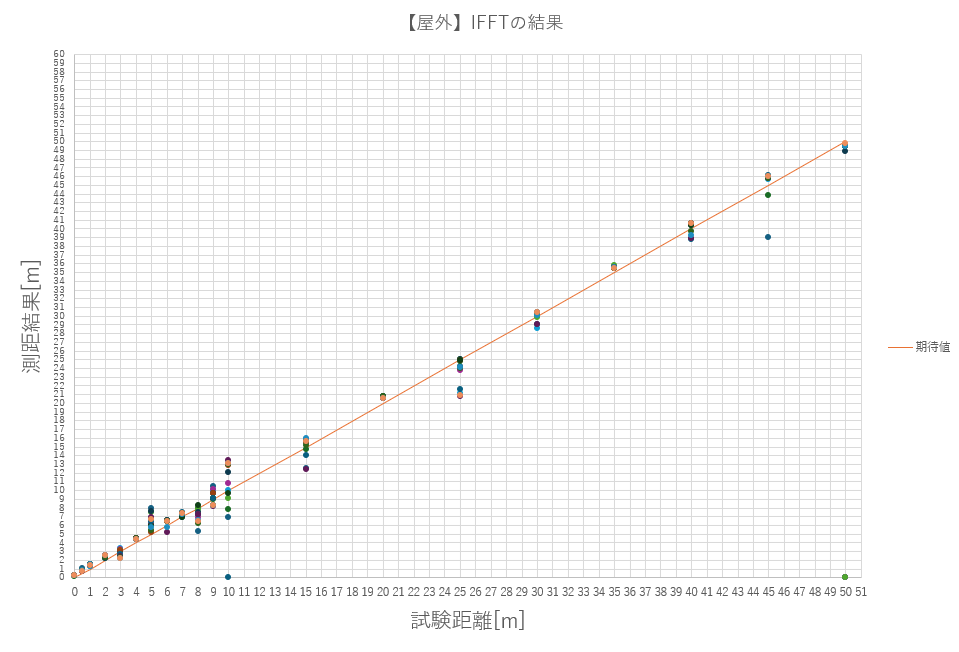
- 全体的に見るとIFFTが最も良い精度となりましたが、稀に0mと測位されることがありました。
RTTの結果
PBRの結果
IFFTの結果
屋内での距離測定
次に屋内でチャネルサウンディングを試してみました。
場所はムセンコネクトの社員ホールです。
10m離して実験をすることが出来ました。
イニシエータデバイスを固定設置して、リフレクターデバイスを動かして距離を離しながら距離測定を実施しました。
結果は以下の通りです。
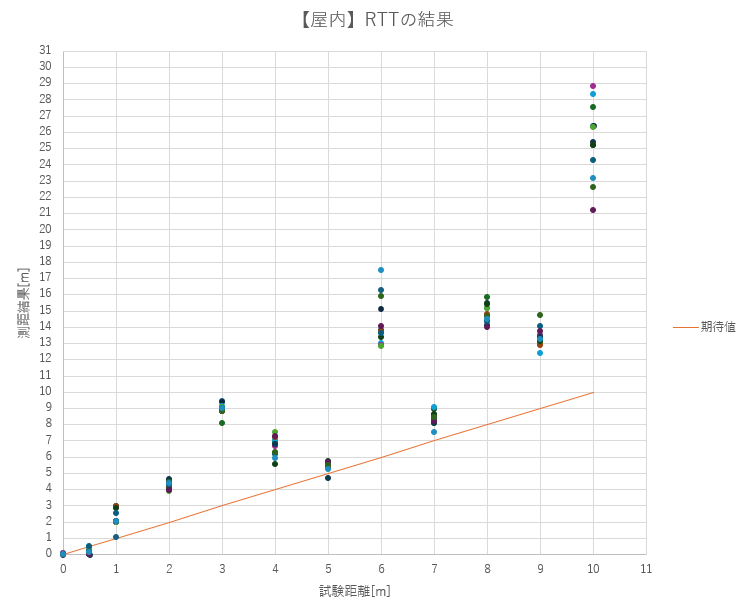
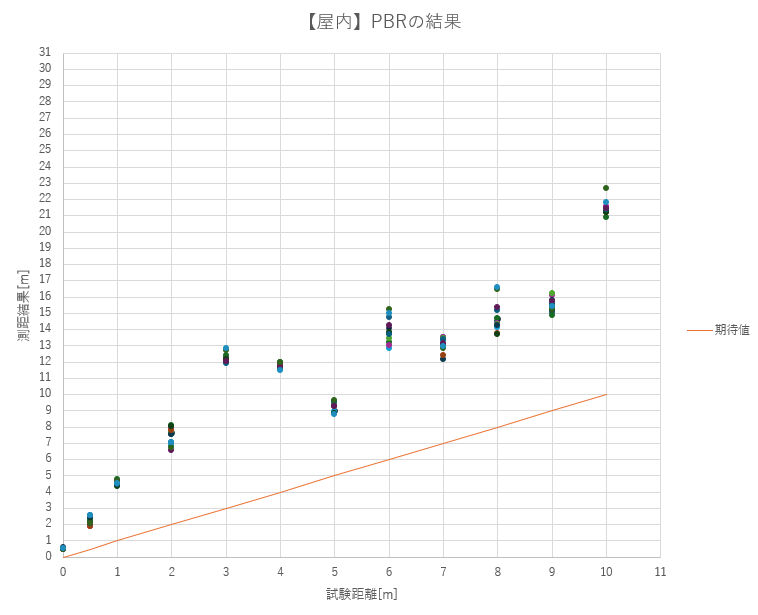
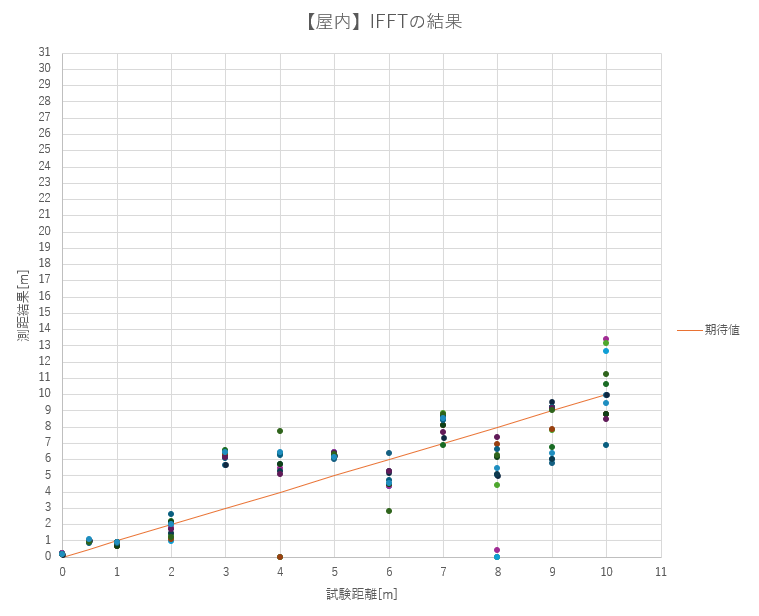
- 屋外の結果と比べると環境要因の影響を受けやすくなる印象です。屋外と比べると距離測定精度が悪くなりました。
- 3m、6m、8m、10mでの測定結果が特に精度が悪くなっています。
- 測定試行毎のバラツキが大きい印象があります。
- RTTとPBRでは全体的に距離が遠い方に測定されました。IFFTではそれが補正されて、3つの手法の中では一番良い結果になりました。
- IFFTでは屋外の時と同じく稀に0mと測位されることがありました。
- 屋外と比べると精度が悪くなり少し残念な結果でしたが、それでも従来のRSSIを利用した距離推定と比較すると距離推定精度がよくなっています。
RTTの結果
PBRの結果
IFFTの結果
まとめ
今回はBluetooth LEの新しい機能であるチャネルサウンディングを実際に試してみました。
UWB通信を利用した距離測定機能に比べると精度はイマイチですが、Bluetooth LEの低価格なSoCで簡単に距離測定ができるのは非常に魅力的です。
Bluetooth SIGによると自動車のスマートキーの用途でチャネルサウンディングの利用が拡大していくと予想されています。
今後も技術的な精度向上に向けた取り組みが進み、数年後には今回の実験結果よりも距離測定精度が上がると思われます。
引き続きムセンコネクトではチャネルサウンディングについて調査・開発をしていきます。
また実験結果を共有していきたいと思います。